About MK

At the forefront of robotics software engineering, I am dedicated to merging advanced robotics frameworks such as ROS2 with cutting-edge artificial intelligence technologies. My work involves developing innovative solutions that enhance the capabilities of autonomous systems, enabling smarter, more efficient robots capable of complex decision-making and interaction in dynamic environments.
On this website, you’ll find a comprehensive overview of my work and interests:
- About: Learn more about my background, education, and professional journey.
- Blog: Read my latest thoughts and insights on robotics, AI, and technology.
- Research: Explore the projects and studies I am involved in, with a focus on robotics software and AI.
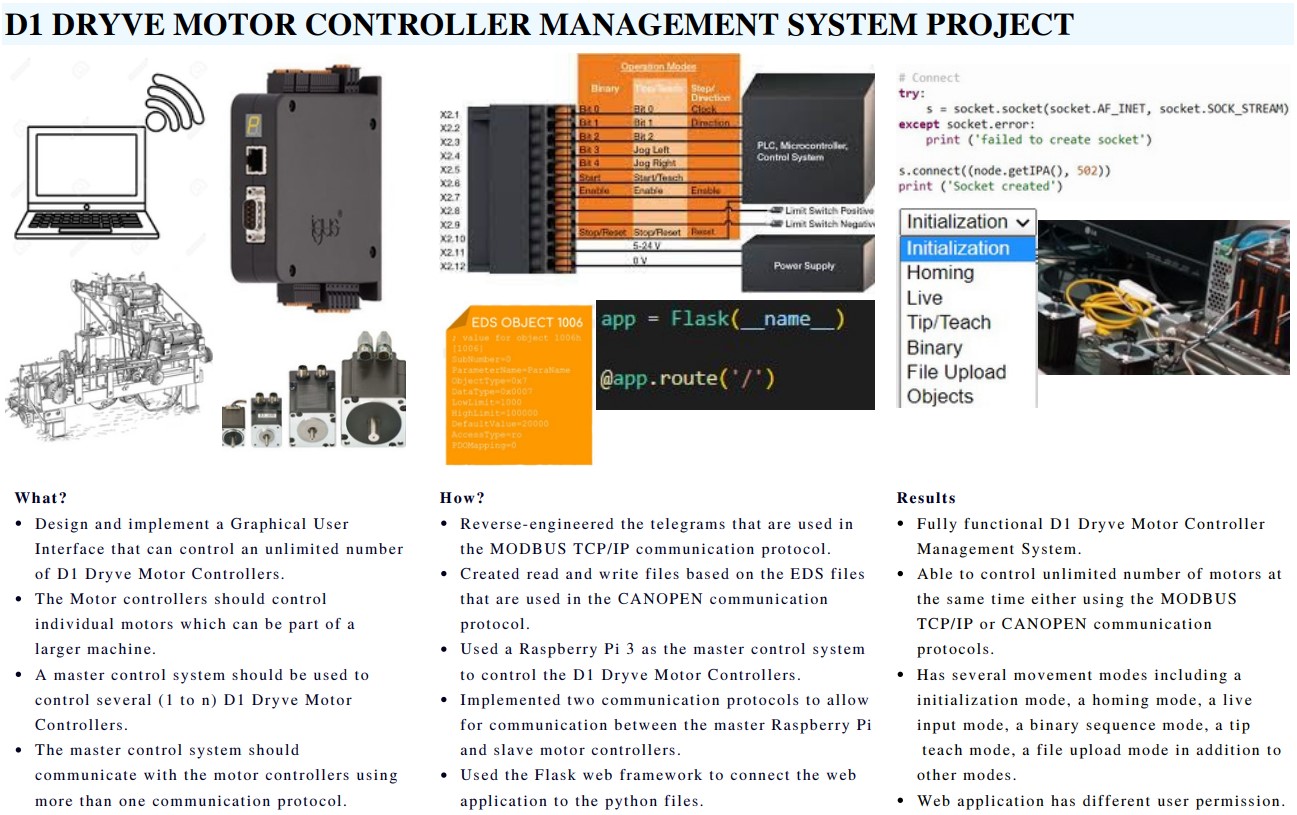
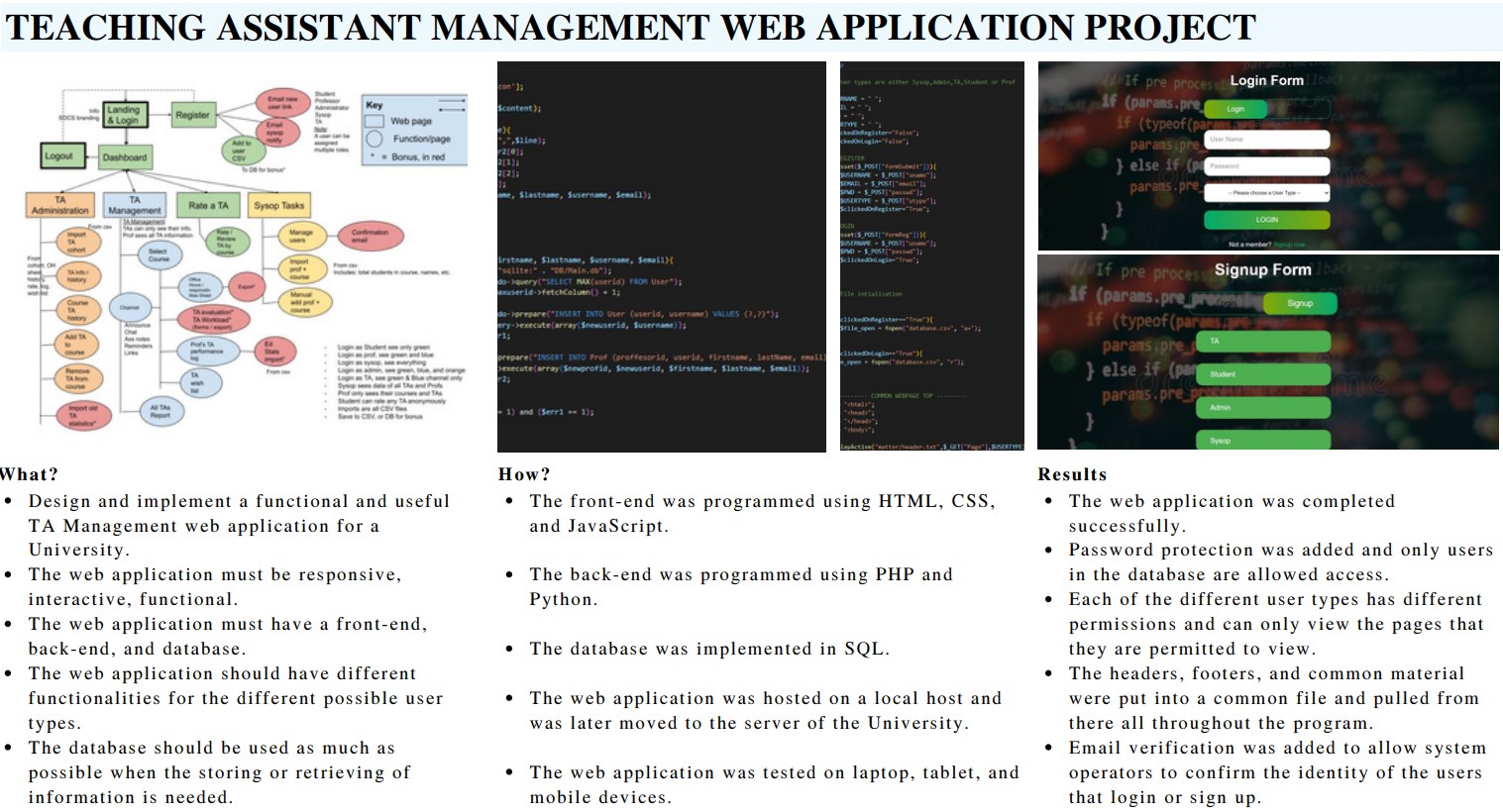
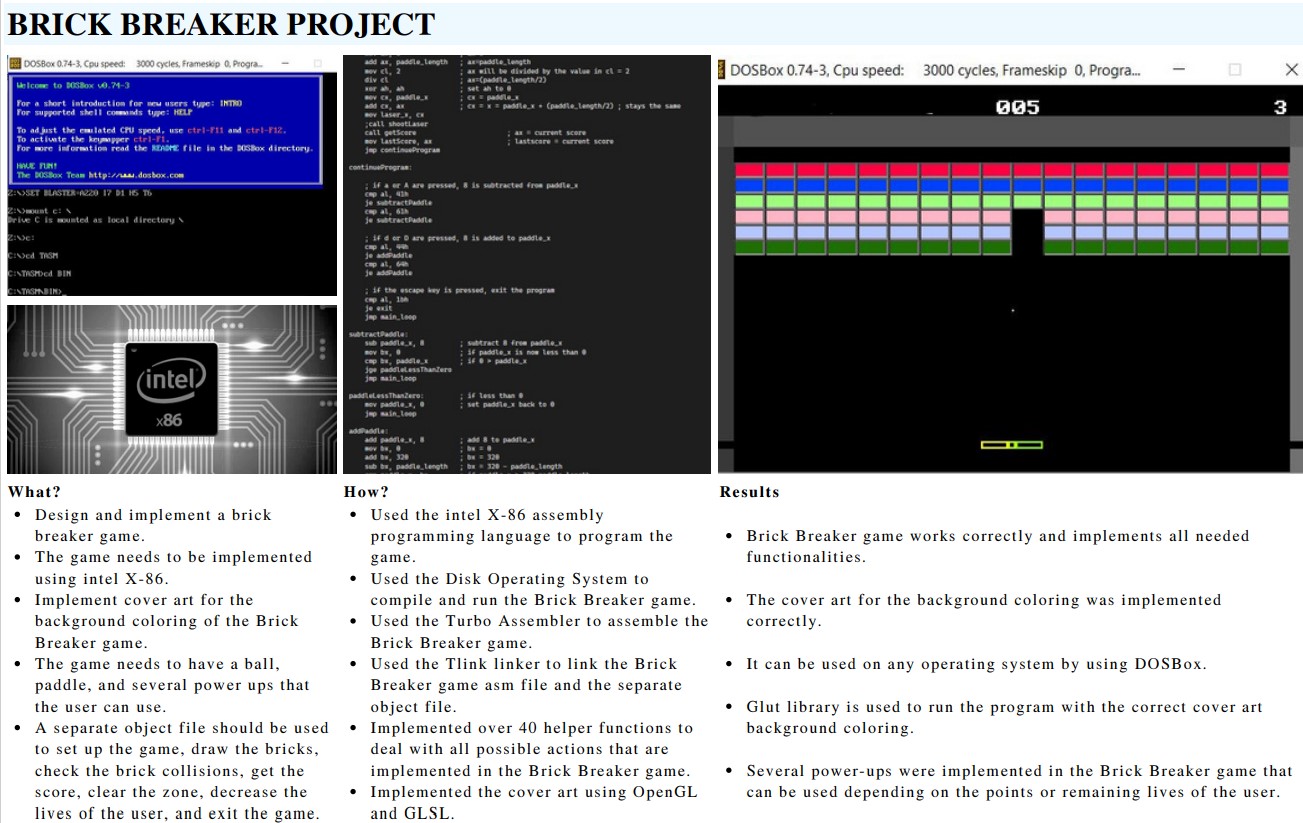
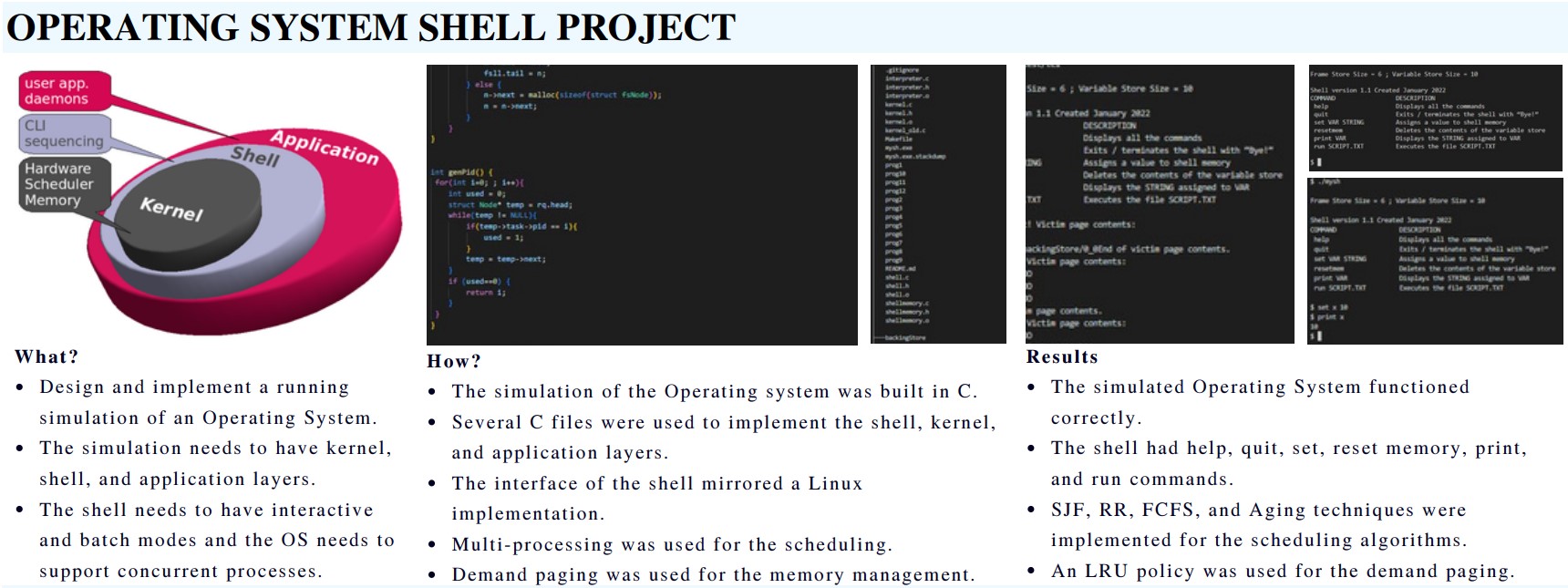
- Projects: Discover the various software and hardware projects I've developed or contributed to.
- Teaching: See the courses and workshops I’ve taught or am currently teaching.